
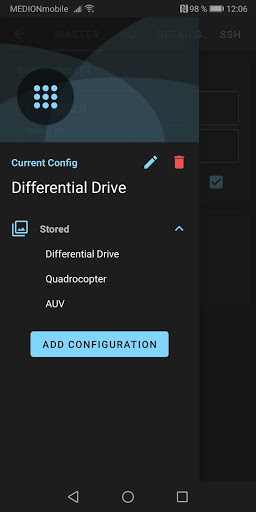
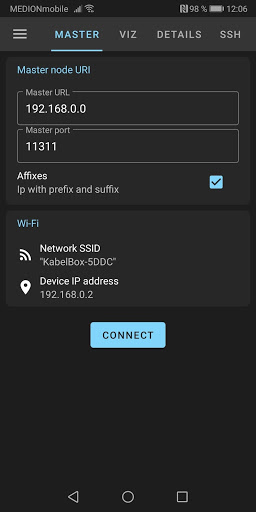
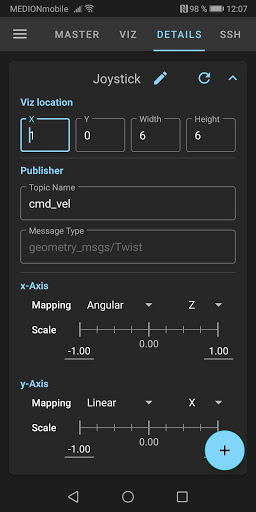
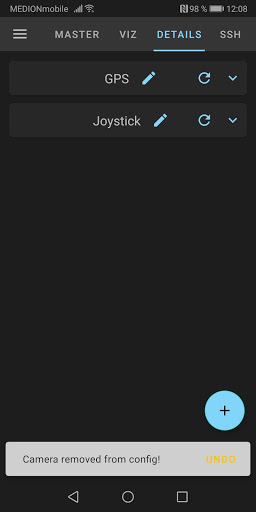
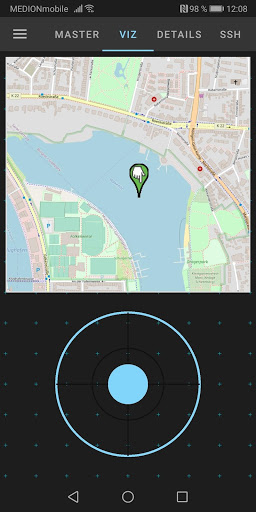
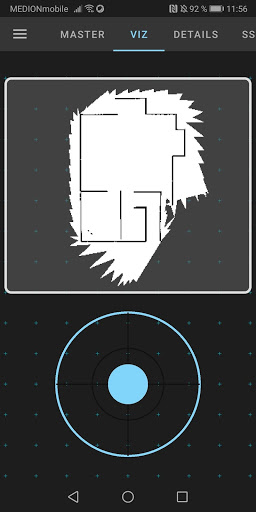
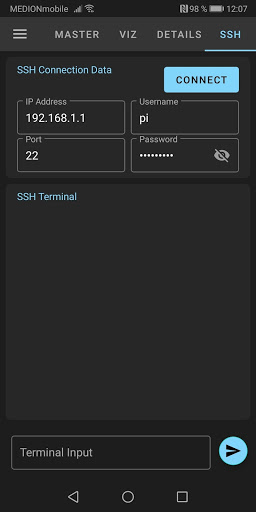
ROS-Mobile è un'applicazione Android progettata per il controllo dinamico e la visualizzazione del sistema robotico mobile gestito dal sistema operativo robot (ROS).L'applicazione utilizza i nodi ROS inizializzando editore e abbonato con messaggi ROS standard.Il modello di architettura del codice complessivo è il modello Visualizza View ViewModel (MVVM), che stabilizza l'applicazione e lo rende altamente personalizzabile.
Se usi Ros-Mobile per la tua ricerca, per favore cita
@Article {ROttMann2020Ros,
Titolo = {ROS-Mobile: un'applicazione Android per il sistema operativo robot}, Autore = {rottmann, Nils e Studt, Nico ed Ernst, Floris e Rueckert, Elmar},
Journal = {Arxiv PreprintArxiv: 2011.02781},
Anno = {2020}
}
per ulteriori dettagli Dai un'occhiata alla nostra pagina GitHub (Cerca Ros-Mobile)
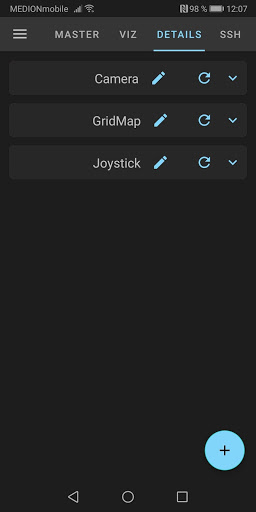
Version 2.1: New Widgets (RqtPlot, Battery, LaserScan, ...) and Bug Fixes





9Apps 4.9













