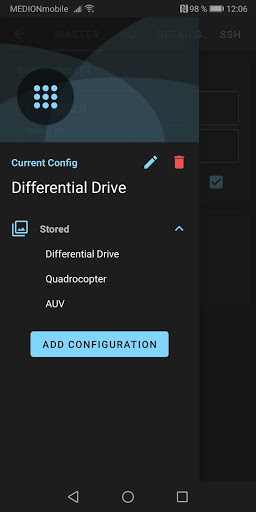
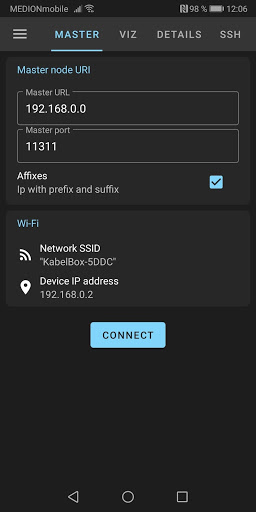
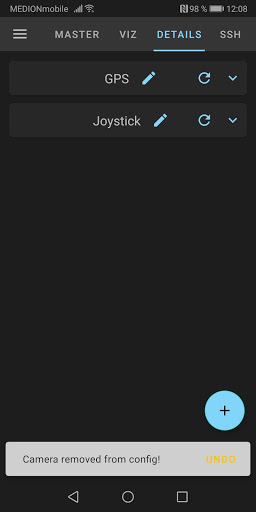
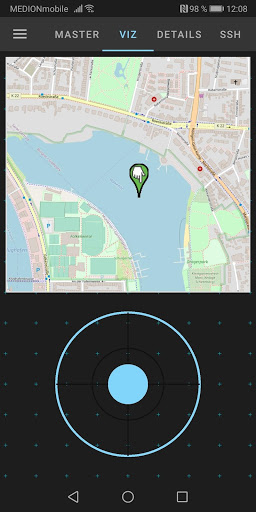
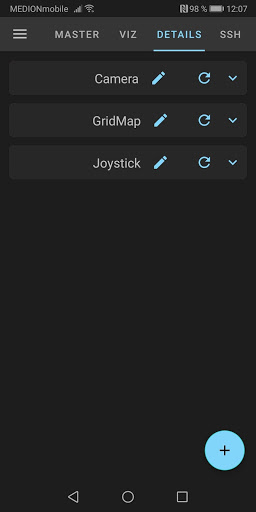
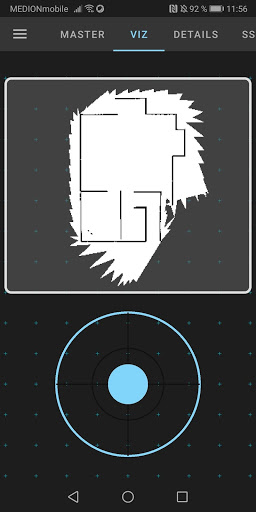
ROS-Mobile - это приложение для Android, предназначенное для динамического управления и визуализации мобильной роботизированной системы, управляемой рабочей системой робота (ROS).Приложение использует ROS NUDLESS INATIVINATION Инициализируя издателя и абонент со стандартными ROS-сообщениями.Общий шаблон архитектуры кода - вид моделей ViewModel (MVVM), который стабилизирует приложение и делает его очень настраиваемым.
Если вы используете ROS-Mobile для вашего исследования, пожалуйста, обратитесь к
@ @ {Rottmann2020ROS,
Название = {ROS-Mobile: Android-приложение для операционной системы Robot},
author = {Rottmann, Nils и Studt, Nico и Ernst, Floris и Rueckert, Elmar},
journal = {Арксив препринтArxiv: 2011.02781},
год = {2020}
}
Для более подробной информации о нашей странице GitHub (поиск ROS-Mobile)
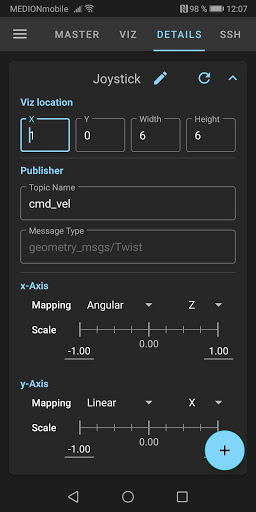
Version 2.1: New Widgets (RqtPlot, Battery, LaserScan, ...) and Bug Fixes
9Apps 4.9