
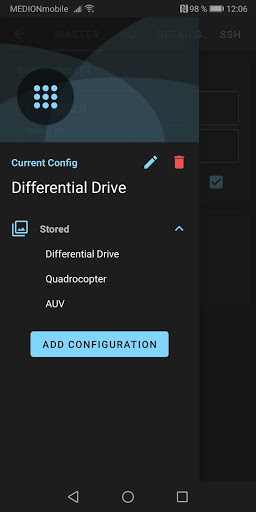
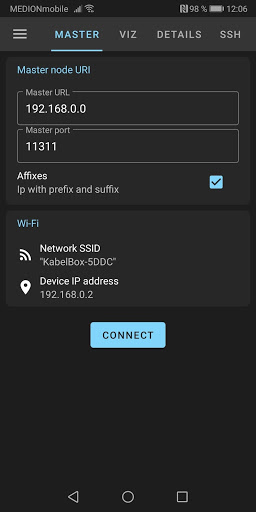
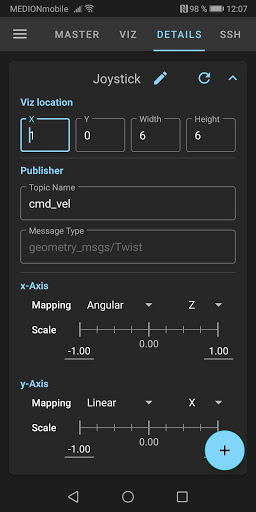
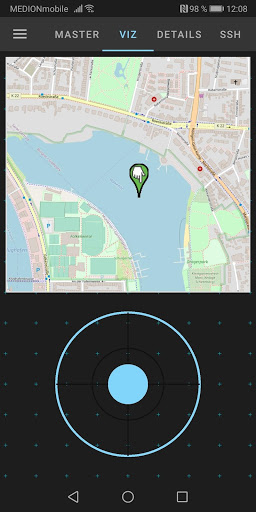
ROS 모바일은 로봇 운영 체제 (ROS)가 운영하는 모바일 로봇 시스템의 동적 제어 및 시각화를 위해 설계된 안드로이드 응용 프로그램입니다.응용 프로그램은 표준 ROS 메시지로 게시자와 가입자를 초기화하는 ROS 노드를 사용합니다.전반적인 코드 아키텍처 패턴은 응용 프로그램을 안정화하고 고도로 사용자 정의 할 수있게 만드는 모델 뷰 뷰 모델 (MVVM)입니다.
Rottmann2020ROS,BR> Title = {ROS-Mobile : 로봇 운영 체제의 안드로이드 응용 프로그램}, 저자 = {Rottmann, Nils 및 Studt, Nico 및 Ernst, Floris 및 Rueckert, Elmar},
저널 = {ARXIV PreprintARXIV : 2011.02781},
}
자세한 내용은 GitHub 페이지 (Ros-Mobile 검색)
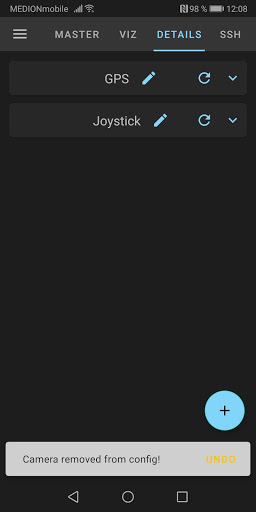
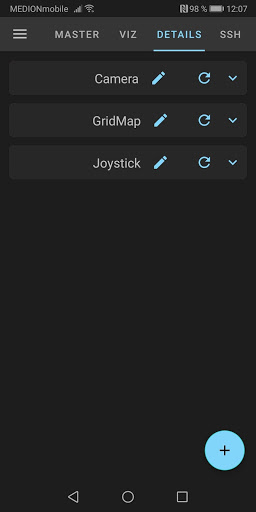
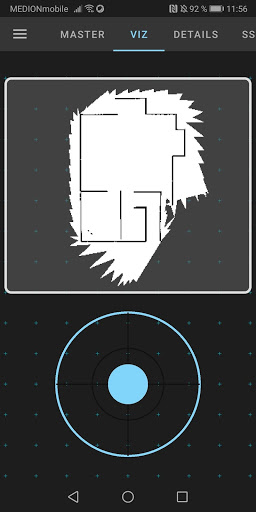
Version 2.1: New Widgets (RqtPlot, Battery, LaserScan, ...) and Bug Fixes





9Apps 4.9













![국세청 홈택스 [손택스] on 9Apps](https://go.getnew.app/sg/res/jpg/f7/df/69cc2f90120ec331db2630e0f5b6-6dh.jpg?x-oss-process=style/jmq200)


