
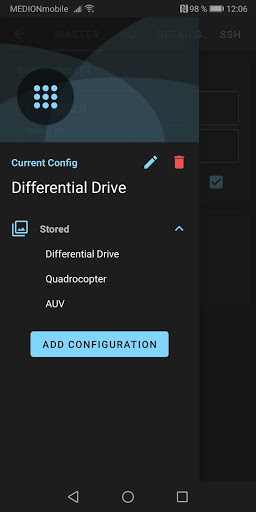
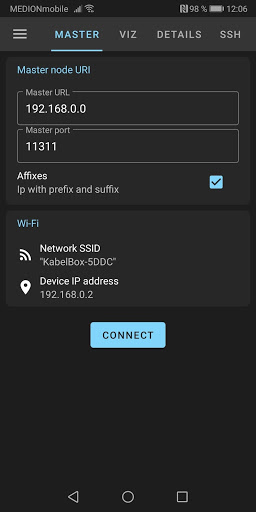
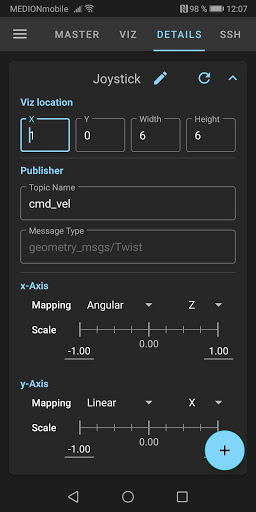
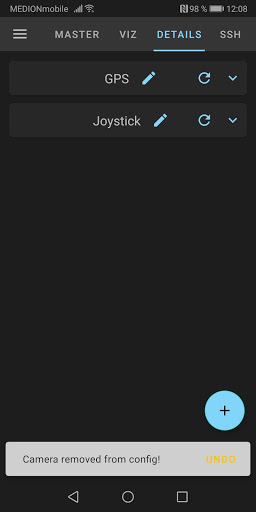
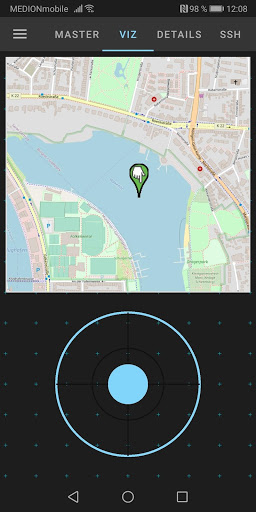
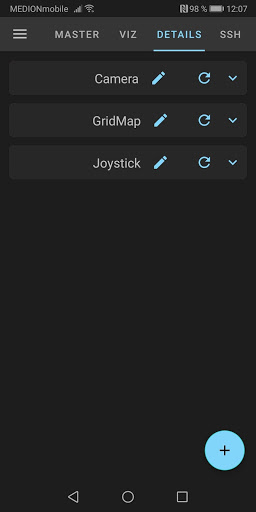
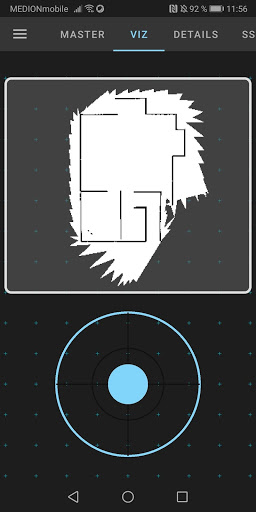
ROS-Mobile là một ứng dụng Android được thiết kế để kiểm soát động và trực quan hóa hệ thống robot di động được vận hành bởi hệ điều hành robot (ROS).Ứng dụng sử dụng các nút ROS khởi tạo nhà xuất bản và thuê bao với các tin nhắn ROS tiêu chuẩn.Mô hình kiến trúc mã tổng thể là Model View ViewModel (MVVM), điều này ổn định ứng dụng và làm cho nó có khả năng tùy biến cao.
Nếu bạn sử dụng ROS-Mobile cho nghiên cứu của mình, vui lòng trích dẫn
@article {Rottmann2020ros,
title = {ros-mobile: một ứng dụng Android cho hệ điều hành robot},
tác giả = {rottmann, nils và studt, floris và ernst, floris và rueckert, Elmar},
Tạp chí = {arxiv instrintarxiv: 2011.02781},
năm = {2020}
}
Để biết thêm chi tiết có một cái nhìn vào trang GitHub của chúng tôi (tìm kiếm ROS-Mobile)
Version 2.1: New Widgets (RqtPlot, Battery, LaserScan, ...) and Bug Fixes





9Apps 4.9














