
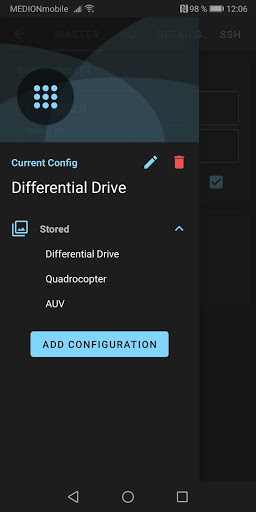
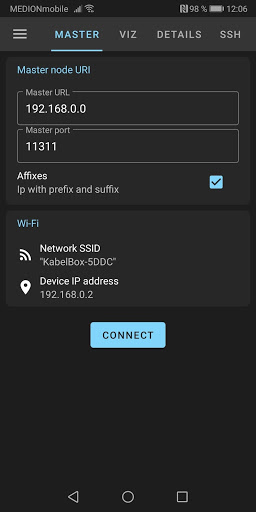
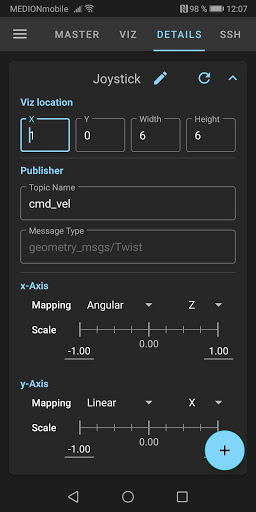
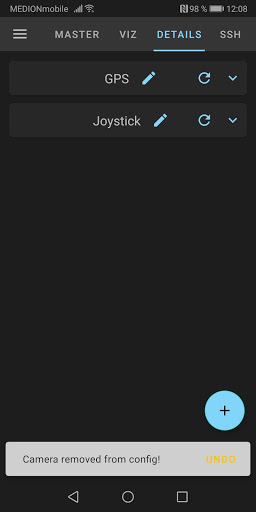
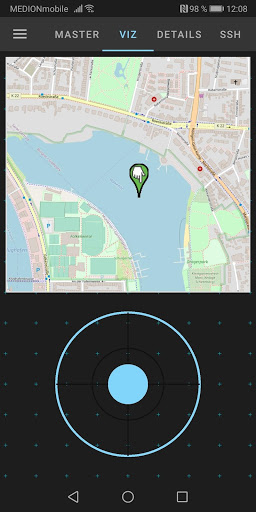
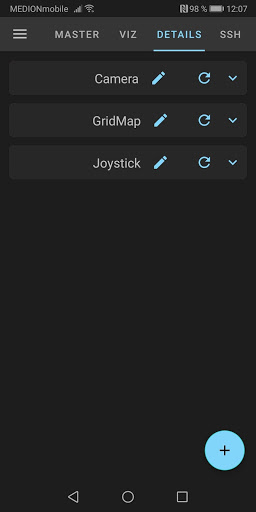
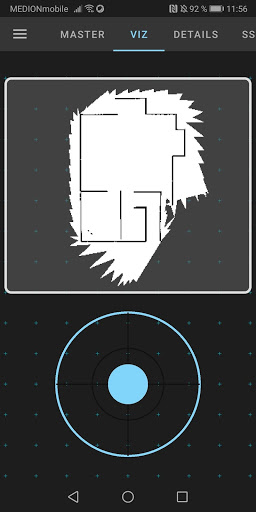
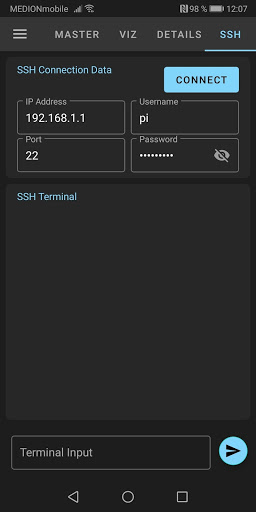
ROS-Mobileは、ロボットオペレーティングシステム(ROS)によって運営されているモバイルロボットシステムの動的制御および可視化のために設計されたAndroidアプリケーションである。アプリケーションは、標準ROSメッセージを使用して、Publisherとサブスクライバを初期化するROSノードを使用します。全体的なコードアーキテクチャパターンは、アプリケーションを安定させ、それを高度にカスタマイズ可能にするモデルビュービューモード(MVVM)です。
Ros-Mobileを調査してください。BR> title = {ROS-Mobile:ロボットオペレーティングシステムのAndroidアプリケーション}、著者= {Rottmann、Nils and Studt、NICO、Ernst、Floris、Rueckert、Elmar}、Elmar}
詳細については、Githubページを見てください(ROS-Mobileの検索)
Version 2.1: New Widgets (RqtPlot, Battery, LaserScan, ...) and Bug Fixes





9Apps 4.9











