
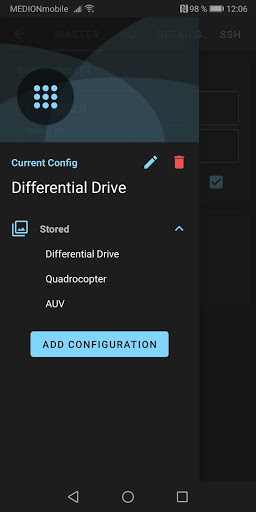
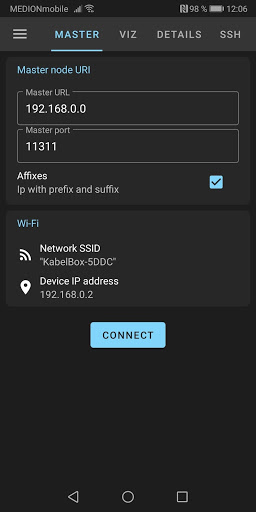
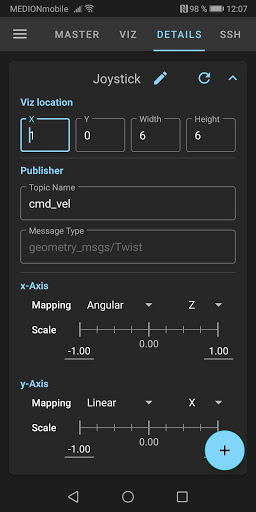
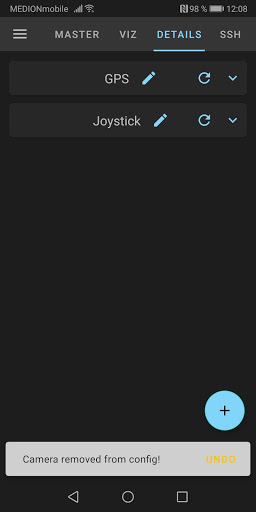
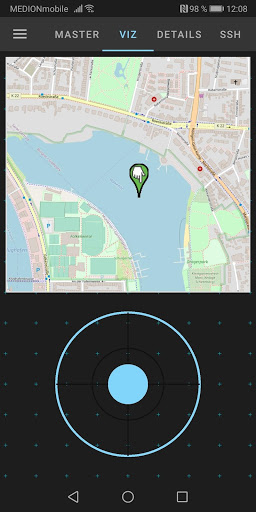
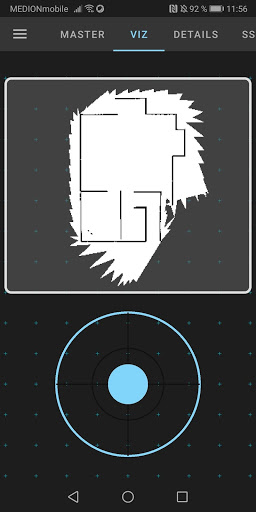
Ros-mobile to aplikacja na Androida przeznaczona do dynamicznej kontroli i wizualizacji mobilnego systemu robota obsługiwanego przez system operacyjny robota (ROS).Aplikacja korzysta z węzłów ROS inicjujących wydawców i subskrybenta standardowymi wiadomościami Ros.Ogólny wzór architektury kodu jest widoku modelu ViewModel (MVVM), który stabilizuje aplikację i sprawia, że jest wysoce konfigurowalny.
Jeśli używasz ROS-Mobile do swoich badań, proszę cytować
@article {Rottmann2020ROS,
Title = {Ros-Mobile: Aplikacja z Androidem dla systemu operacyjnego robota}, autor = {Rottmann, Nils and Studt, Nico i Ernst, Floris i Rueckert, Elmar}, Największa Journal = {Arxiv PreprintArxiv: 2011.02781},
Rok = {2020}
}
Więcej informacji można znaleźć na naszej stronie Github (wyszukaj ros-mobile)
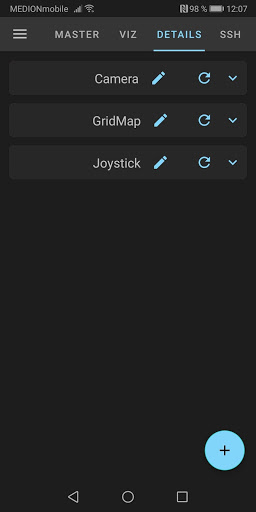
Version 2.1: New Widgets (RqtPlot, Battery, LaserScan, ...) and Bug Fixes





9Apps 4.9















