
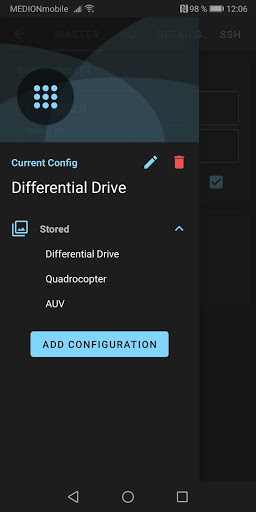
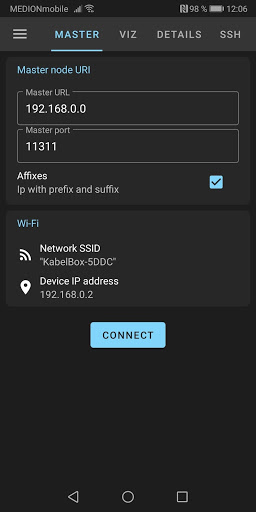
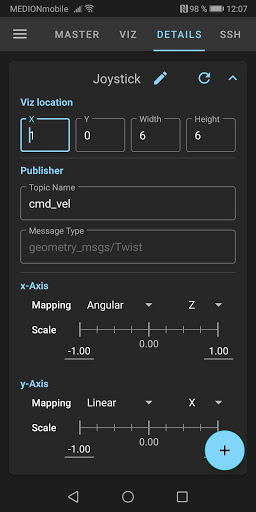
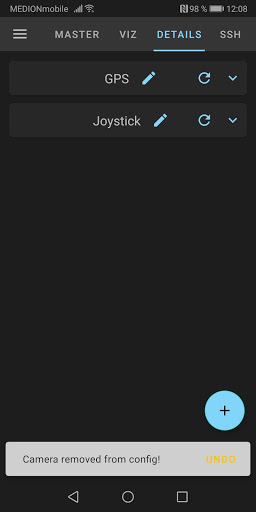
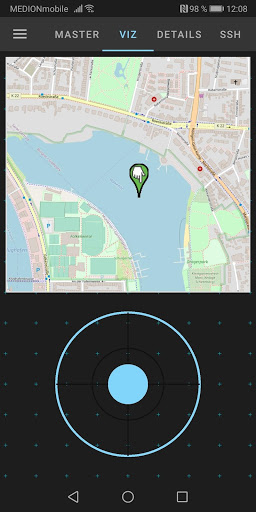
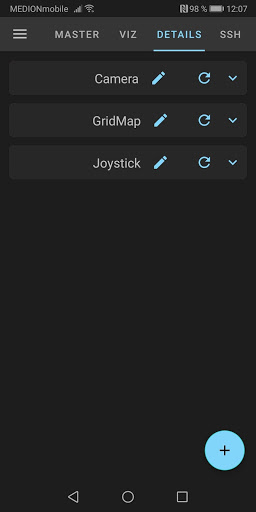
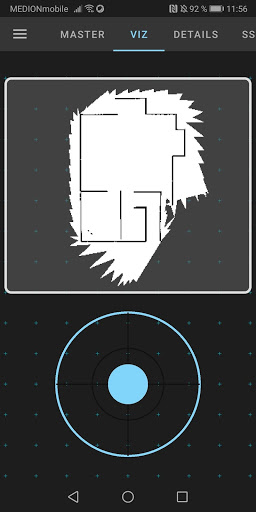
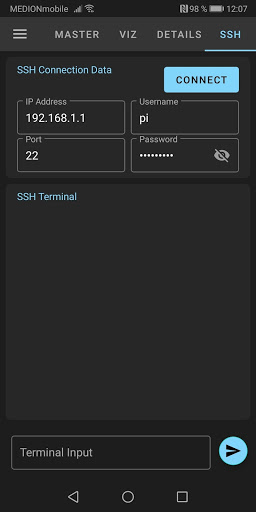
Ros-Mobile ist eine Android-Anwendung, die für dynamische Steuerung und Visualisierung des vom Roboterbetriebssystems betriebenen mobilen Robotersystems (ROS) ausgelegt ist.Die Anwendung verwendet ROS-Knoten initialisiert Publisher und -onnent mit Standard-ROS-Nachrichten.Das Gesamtcode-Architektur-Muster ist Modellansicht ViewModel (MVVM), der die Anwendung stabilisiert und ist sehr anpassbar.
Wenn Sie Ros-Mobile für Ihre Forschung verwenden, zünden Sie bitte @Article {Rottmann2020ROS,
title = {Ros-Mobile: Eine Android-Anwendung für das Roboter-Betriebssystem},
Autor = {Rottmann, Nils und Studt, Nico und Ernst, Floris und Rueckert, Elmar},
Journal = {arxiv PreprintArxiv: 2011.02781},
jedes Jahr = {2020}
Für weitere Details schauen Sie sich auf unsere Github-Seite (Suche nach Ros-Mobile)
Version 2.1: New Widgets (RqtPlot, Battery, LaserScan, ...) and Bug Fixes





9Apps 4.9















