
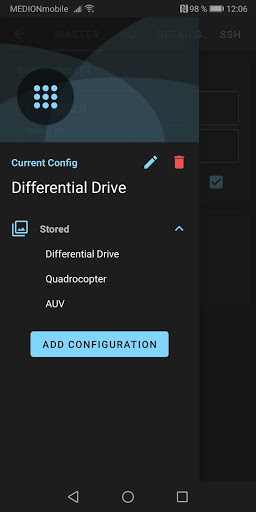
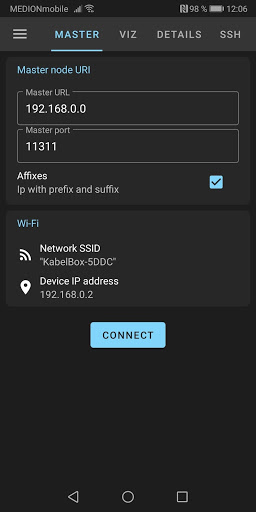
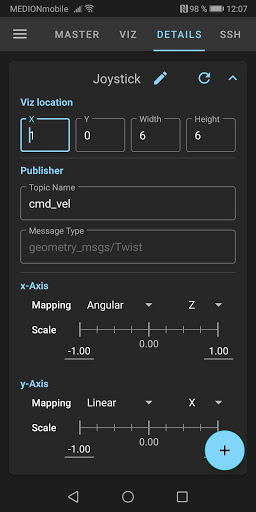
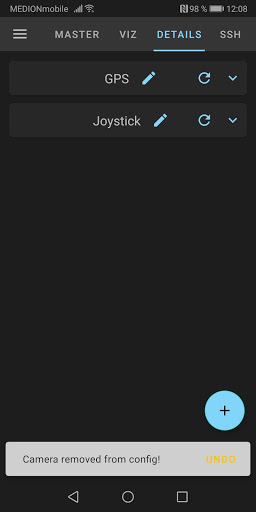
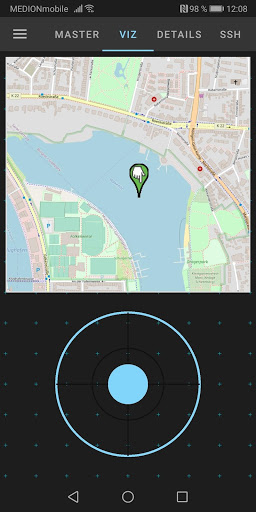
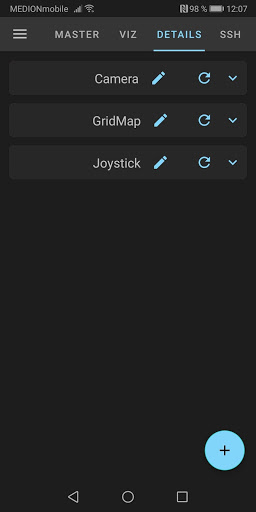
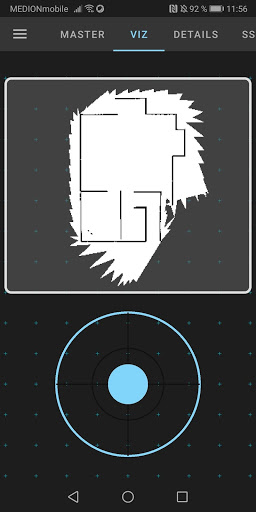
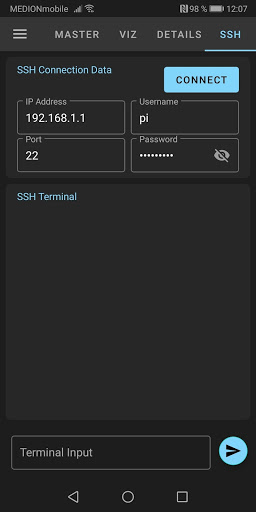
Ros-Mobile est une application Android conçue pour le contrôle dynamique et la visualisation du système robotique mobile fonctionnant par le système d'exploitation du robot (ROS).L'application utilise des nœuds ROS initialisant l'éditeur et l'abonné avec des messages ROS standard.Le modèle d'architecture de code global est la vue de modèle ViewModel (MVVM), qui stabilise l'application et le rend hautement personnalisable.
Si vous utilisez ROS-Mobile pour votre recherche, veuillez citer
@ARTICH {Rottmann2020Ros,
Titre = {Ros-Mobile: une application Android pour le système d'exploitation de robot},
Auteur = {Rottmann, NiLs and Studt, Nico et Ernst, Floris et Rueckert, Elmar},
Journal = {ARXIV PRÉPEPRINTArxiv: 2011.02781}, Année = {2020}
}
Pour plus de détails, consultez notre page GitHub (recherche sur ROS-Mobile)
Version 2.1: New Widgets (RqtPlot, Battery, LaserScan, ...) and Bug Fixes





9Apps 4.9











