
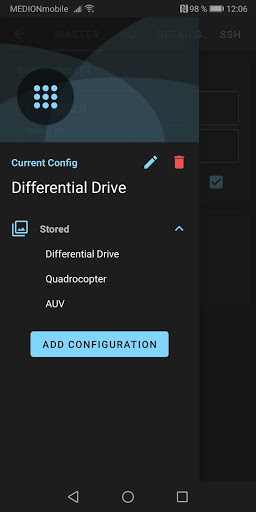
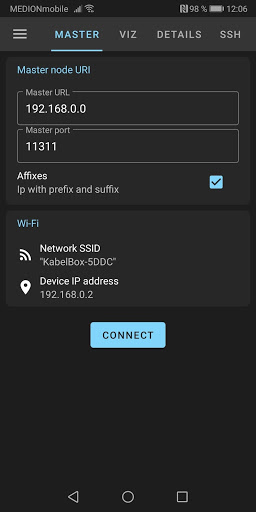
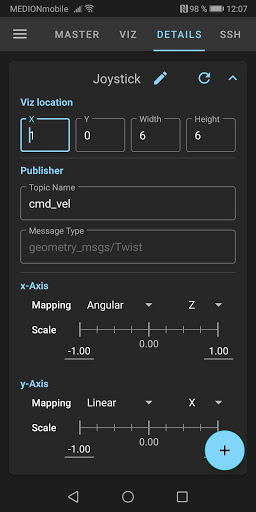
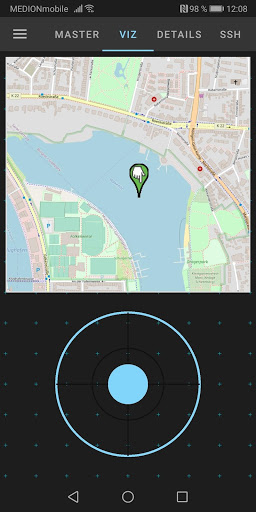
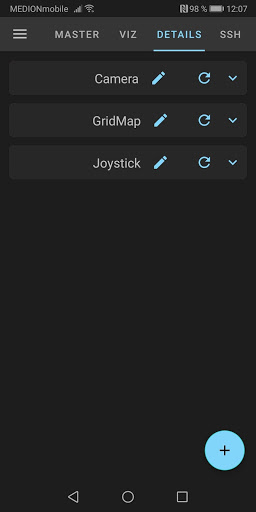
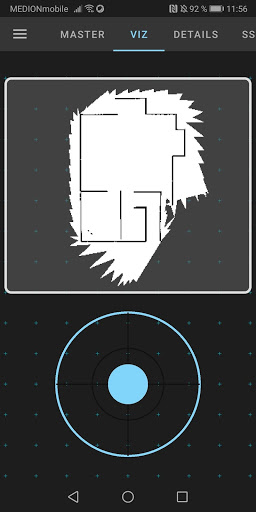
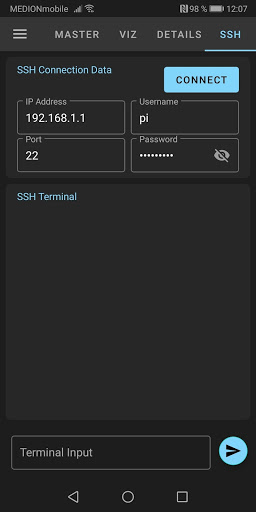
ROS-MOBILE is een Android-applicatie ontworpen voor dynamische controle en visualisatie van mobiel robotsysteem dat wordt geëxploiteerd door het robotbesturingssysteem (ROS).De applicatie gebruikt ROS-knooppunten initialiseert de uitgever en abonnee met standaard ROS-berichten.Het algemene codestarchitectiepatroon is modelweergave ViewModel (MVVM), die de applicatie stabiliseert en het zeer aanpasbaar maakt.
Als u Ros-Mobile gebruikt voor uw onderzoek, citeer alsjeblieft @article {Rottmann2020ros,
TITLE = {ROS-MOBILE: een Android-applicatie voor het Robot-besturingssysteem},
Author = {Rottmann, Nils and Studt, Nico en Ernst, Floris en Rueckert, Elmar},
Journal = {arxiv preprintARXIV: 2011.02781},
jaar = {2020}
Voor meer informatie kunt u een kijkje nemen op onze Github-pagina (zoek naar Ros-Mobile)
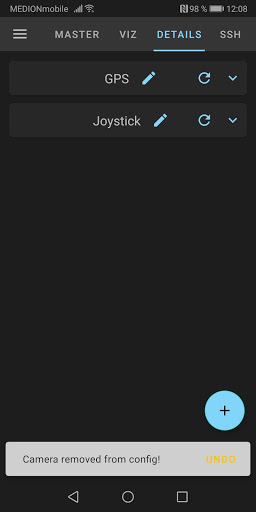
Version 2.1: New Widgets (RqtPlot, Battery, LaserScan, ...) and Bug Fixes





9Apps 4.9













