
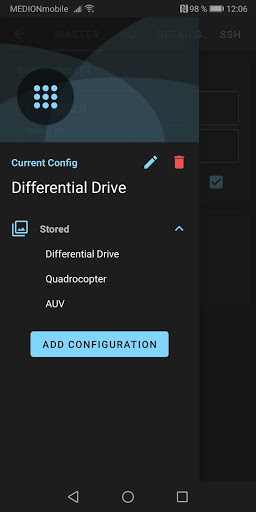
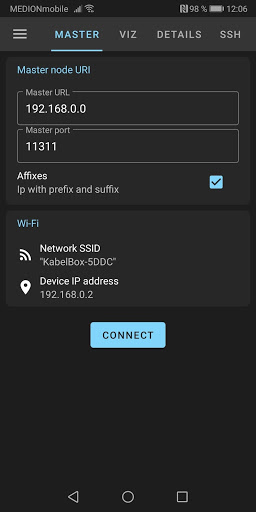
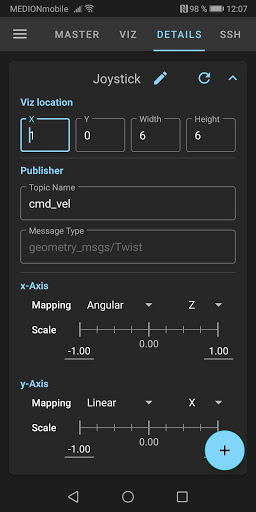
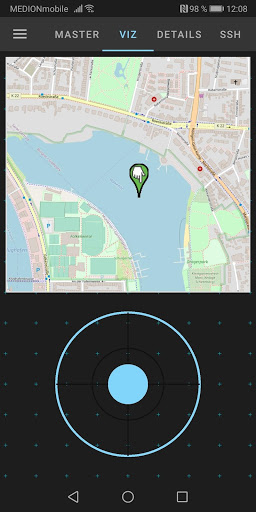
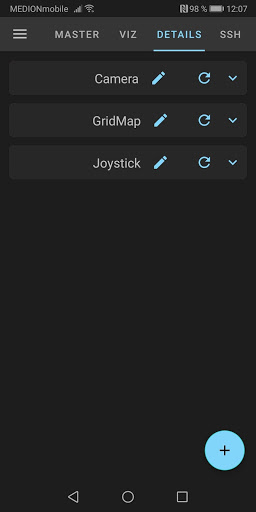
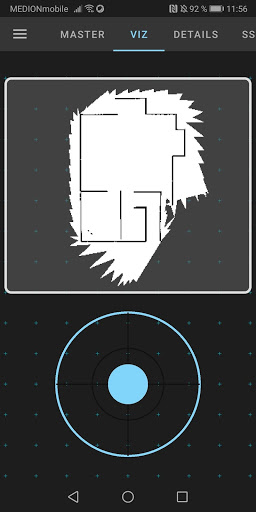
ROS-Mobile es una aplicación Android diseñada para el control dinámico y la visualización del sistema robótico móvil operado por el sistema operativo Robot (ROS).La aplicación utiliza ROS Nodos inicializando al editor y suscriptor con mensajes estándar de ROS.El patrón de arquitectura de código general es ViewModel de visión del modelo (MVVM), que estabiliza la aplicación y lo hace altamente personalizable.
Si usa Ros-Mobile para su investigación, por favor cite
@Artículo {Rottmann2020ros,
title = {ros-mobile: una aplicación de Android para el sistema operativo Robot},
Author = {Rottmann, Nils and Studt, Nico y Ernst, Floris y Rueckert, Elmar},
Journal = {Arxiv PreprintARXIV: 2011.02781},
Año = {2020}
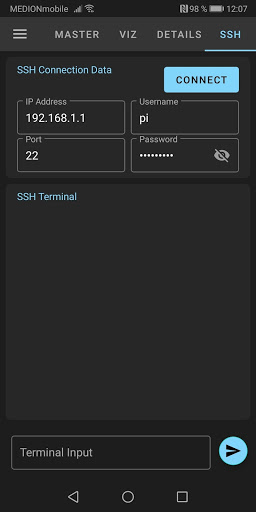
Detalles Más detalles En nuestra página GitHub (búsqueda de ROS-MOBIR)
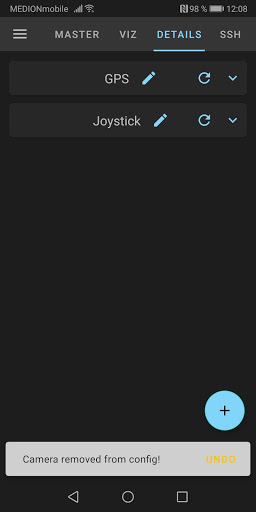
Version 2.1: New Widgets (RqtPlot, Battery, LaserScan, ...) and Bug Fixes





9Apps 4.9














