
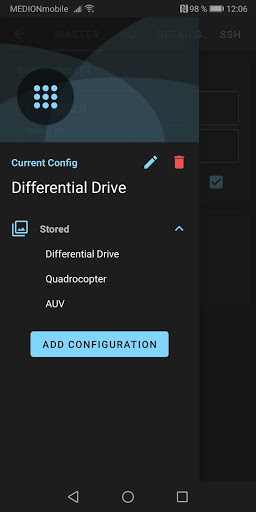
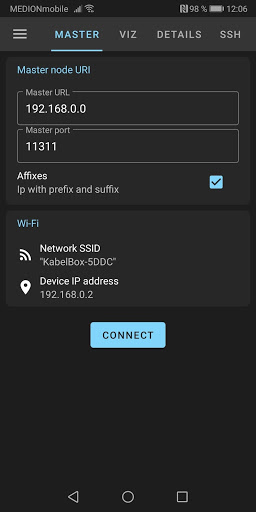
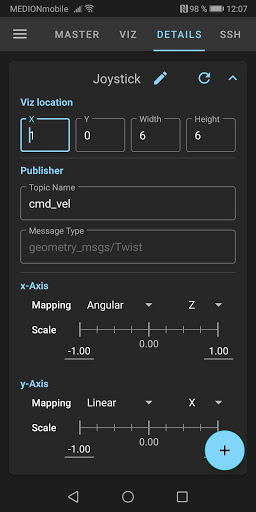
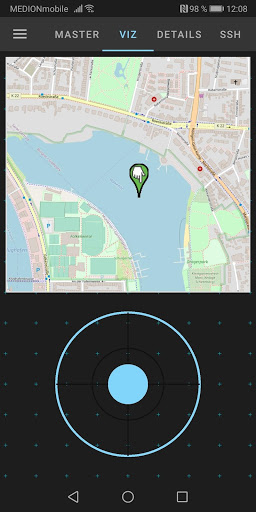
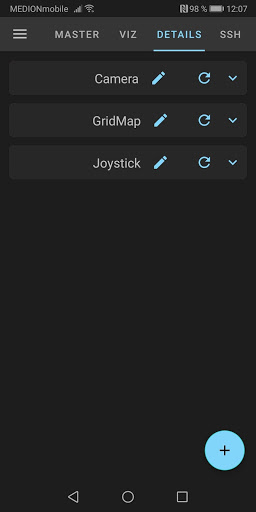
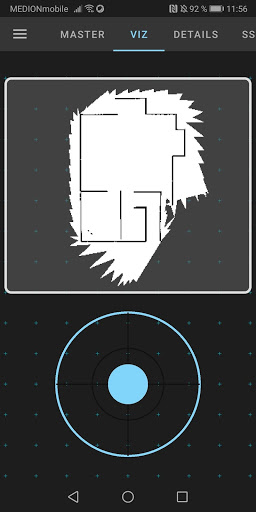
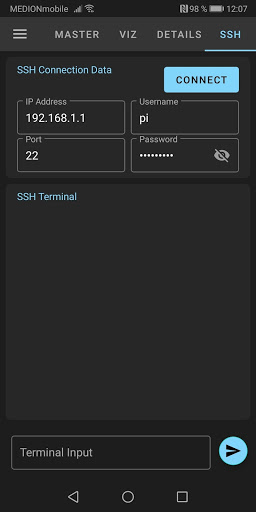
ROS-Mobile adalah aplikasi android yang dirancang untuk kontrol dinamis dan visualisasi sistem robot seluler yang dioperasikan oleh sistem operasi robot (ROS).Aplikasi ini menggunakan node ROS menginisialisasi penerbit dan pelanggan dengan pesan ROS standar.Pola arsitektur kode keseluruhan adalah model View ViewModel (MVVM), yang menstabilkan aplikasi dan membuatnya sangat dapat disesuaikan.
Jika Anda menggunakan ROS-Mobile untuk penelitian Anda, silakan mengutip
@Article {Rottmann2020ros,
title = {ROS-Mobile: Aplikasi Android untuk sistem operasi robot},
penulis = {Rottmann, Nils dan Studt, Nico dan Ernst, Floris dan Rueckert, Elmar},
Journal = {Arxiv PrackrintARXIV: 2011.02781},
tahun = {2020}
}
Untuk perincian lebih lanjut Lihat ke halaman github kami (Cari ROS-Mobile)
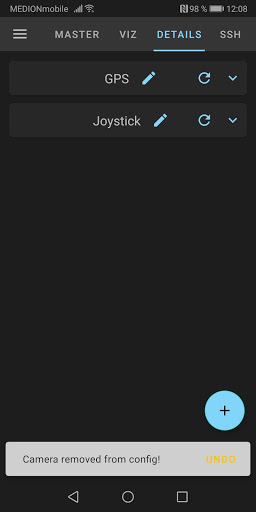
Version 2.1: New Widgets (RqtPlot, Battery, LaserScan, ...) and Bug Fixes
9Apps 4.9















