
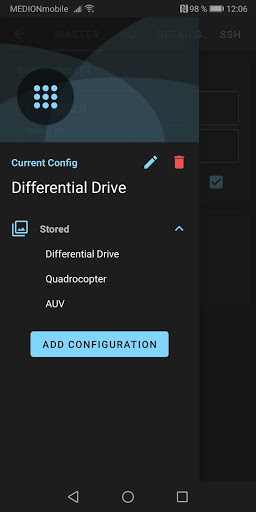
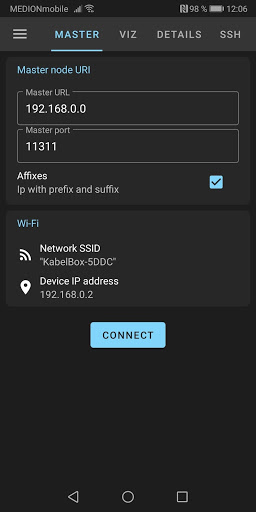
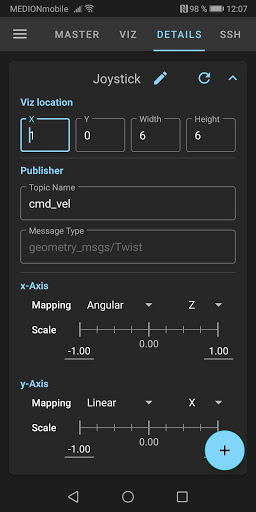
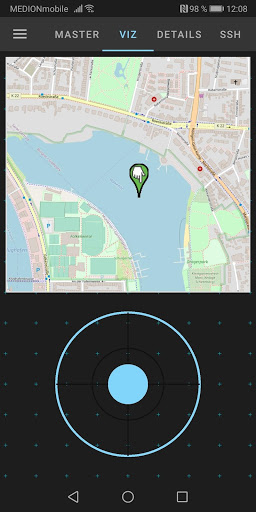
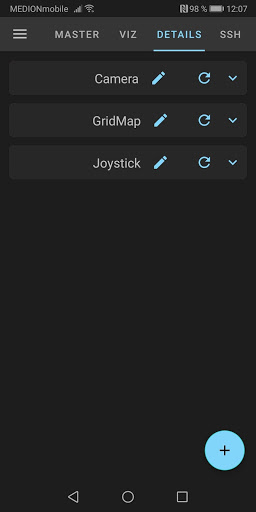
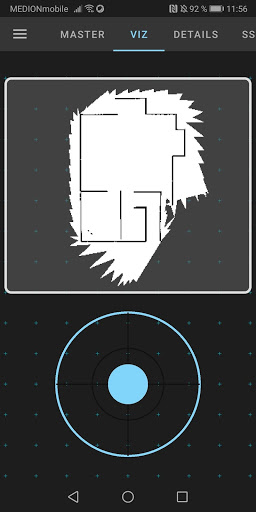
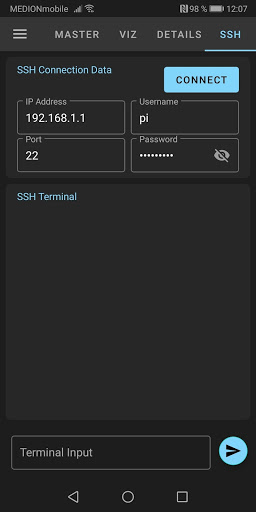
O Ros-Mobile é um aplicativo Android projetado para controle dinâmico e visualização do sistema robótico móvel operado pelo sistema operacional robô (ROS).O aplicativo usa os nós de ROS Inicializando o editor e o assinante com mensagens padrão de ROS.O padrão geral de arquitetura de código é o modelo ViewModel (MVVM), que estabiliza o aplicativo e o torna altamente personalizável.
Se você usa Ros-Mobile para sua pesquisa, por favor cite
@article {Rottmann2020Ros,
Title = {ROS-Mobile: um aplicativo para Android para o sistema operacional robô}, Autor = {Rottmann, Nils e Studt, Nico e Ernst, Floris e Rueckert, Elmar}, Journal = {Arxiv PreprintArXIV: 2011.02781}, ano = {2020}
}
Para mais detalhes Dê uma olhada na nossa página do Github (procure por Ros-mobile)
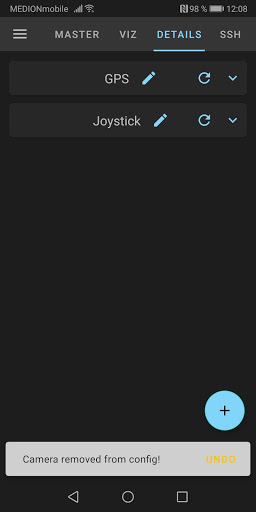
Version 2.1: New Widgets (RqtPlot, Battery, LaserScan, ...) and Bug Fixes





9Apps 4.9
















