

✴ Esta aplicación de ingeniería de robótica proporciona el know-how basico en los fundamentos de la robótica: modelado, planificación y control.
►La aplicación lleva al usuario a través de un proceso de diseño paso a paso en este área especial para avanzar rápidamente de Robot Design. Esta aplicación proporciona al ingeniero profesional y al estudiante con métodos y ejemplos importantes y detallados de cómo diseñar las partes mecánicas de robots y sistemas automatizados. La aplicación de robótica énfasis en los aspectos eléctricos y de control del diseño sin ninguna cobertura práctica de cómo diseñar y construir los componentes, la máquina o el sistema.✫
► Descripción de los fundamentos técnicos a las implicaciones sociales y éticas de la robótica, La aplicación proporciona una colección integral de los logros en el campo, y constituye una premisa de avances adicionales hacia los nuevos desafíos en la robótica.
►Esta Guía completa toma un enfoque introductorio a la robótica, que guía al usuario a través de la electrónica esencial. , mecánica y habilidades de programación necesarias para construir su propio robot. Esta aplicación está enfocada en modelos geométricos de mecanismos de robots. Matriz de rotación y orientación y cuaterniones. Pose y desplazamiento de un objeto se reparten matemáticamente con matrices de transformación homogéneas.✫
►La aplicación es un paseo real a través de los fundamentos de las cinemáticas, dinámicas y control de nivel conjunto, luego los modelos de cámaras, el procesamiento de la imagen, la extracción de características y geometría epipolar, y lo llevan a todos juntos en un sistema de servo visual.✫
❰ ❰ ❰ € a los investigadores y estudiantes graduados en robótica y sistemas automatizados, ingeniería eléctrica y mecánica, economía internacional, inteligencia artificial y percepción de la máquina.
Humanoides, Space Robotics, Automatización industrial ❱
☆ Finalmente, la aplicación analiza las contribuciones y las limitaciones que han surgido de diferentes metodologías de investigación, posibles aplicaciones educativas y conceptos de interacción humana-robot para el desarrollo de Los paradigmas anteriores. ☆
Robotic Sistemas
⇢ Usos actuales de los robots
⇢ Componentes de robots
⇢ ¿Qué son los robots industriales?
⇢ Beneficios de los robots
⇢ Posición y orientación de los objetos en automatización robótica
⇢ la Cinemática de manipuladores - Adelante e inverso
cinemática de manipuladores: análisis de velocidad
⇢ ¿Cómo funciona el sistema de reconocimiento de voz de un robot?
⇢ Sensores de luz en robots
⇢ Sistema de visión en robots
⇢ Robots en ingeniería y fabricación
⇢ Robótica: Construcción de un robot
⇢ Robótica: Estructura de robots industriales o manipuladores: Tipos de cuerpos base - I
⇢ Robótica: Estructura de robots industriales o manipuladores: Tipos de base Bodies - II
⇢ Manipulación Sistema robótico: Robots de tipo manual
⇢ Las características requeridas de un multi-metro para el edificio de robots
⇢ Resistencia a la medición de las resistencias
⇢ Las características opcionales de los múltiples metros para el robot Edificio
⇢ Resistores variables: Identificación de potenciómetros
⇢ El chip del comparador de voltaje LM393
⇢ Cómo probar LED L Amplificaciones
⇢ Atributos LED básicos
⇢ Robots articulados - SCANA Y PUMA
⇢ Cuerpos base de robots: Base de robot articulada
⇢ Base Base de robots: Robot de base esférica - Control y aplicación
⇢ Sistema robótico de manipulación: tele-control o robot remotamente operado
⇢ Robot de base esférica: construcción y espacio de trabajo
⇢ Cuerpos base de robots: Robot de base cilíndrica
⇢ Introducción a la tecnología de robótica
⇢ Ventajas de Robótica en Ingeniería
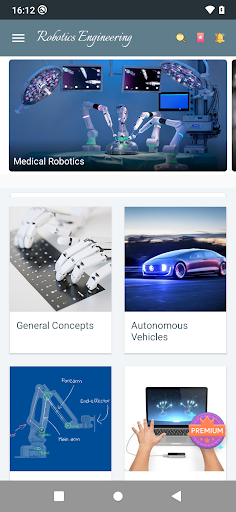
⇢ Robótica médica
⇢ Trato con robots industriales desmotados
⇢ Métodos de ajuste de bucle PID para robótica
⇢ Honda Asimo - ¿Cuánto tiempo a los robots en la casa?
⇢ Los cerebros y Cuerpo de un robot
⇢ El futuro de la robótica
⇢ Manipulación Sistemas robóticos: Robot de tipo automático
⇢ Características adicionales recomendadas para multímetros en la construcción de robots
⇢ Resistencias de identificación y compras
⇢ Auto-aprendizaje Conceptos del sistema de control Simplificado
⇢ Automatización
⇢ Tipos de robot
⇢ Estudios requeridos en robótica
⇢ Technolog ies de un robot





9Apps 4.9














